GEMV2 is a geometry-based, efficient propagation model for vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication.
MAIN FEATURES
- Uses outlines of vehicles, buildings, and foliage to distinguish the following three types of links: line of sight (LOS), non-LOS due to vehicles, and non-LOS due to static objects
- Deterministically calculates large-scale signal variations (path-loss and shadowing)
- Calculates the small-scale signal variations using the number and size of objects around the communicating vehicles
- Models both V2V and V2I links
- Validated against V2V and V2I measurements in urban, suburban, highway, and open space environments
- Imports vehicular mobility from SUMO; uses floating car data format to generate vehicle outlines
- Imports outlines of buildings and foliage from OpenStreetMap
- Easily extensible to import vehicular mobility and object outlines from other data sources
- Exports the visualization of vehicular communication to KML format (for use with Google Earth or NASA World Wind)
- Implemented in MATLAB; free of charge and openly distributed
- Implementation in C++ for OMNet++/Artery available.
GEMV2 was developed by Mate Boban as part of his Ph.D. thesis work. If you find it useful in your work, please cite the following reference:
Mate Boban, Joao Barros, and Ozan K. Tonguz: “Geometry-Based Vehicle-to- Vehicle Channel Modeling for Large-Scale Simulation,” IEEE Transactions on Vehicular Technology, Vol. 63, No. 9, November 2014, doi:10.1109/TVT.2014.2317803 [PDF][BibTeX]
Google Earth visualization of GEMV2 output
V2V communication: transition between line of sight (LOS) and non-LOS conditions

Google Earth output of GEMV2 - city-wide
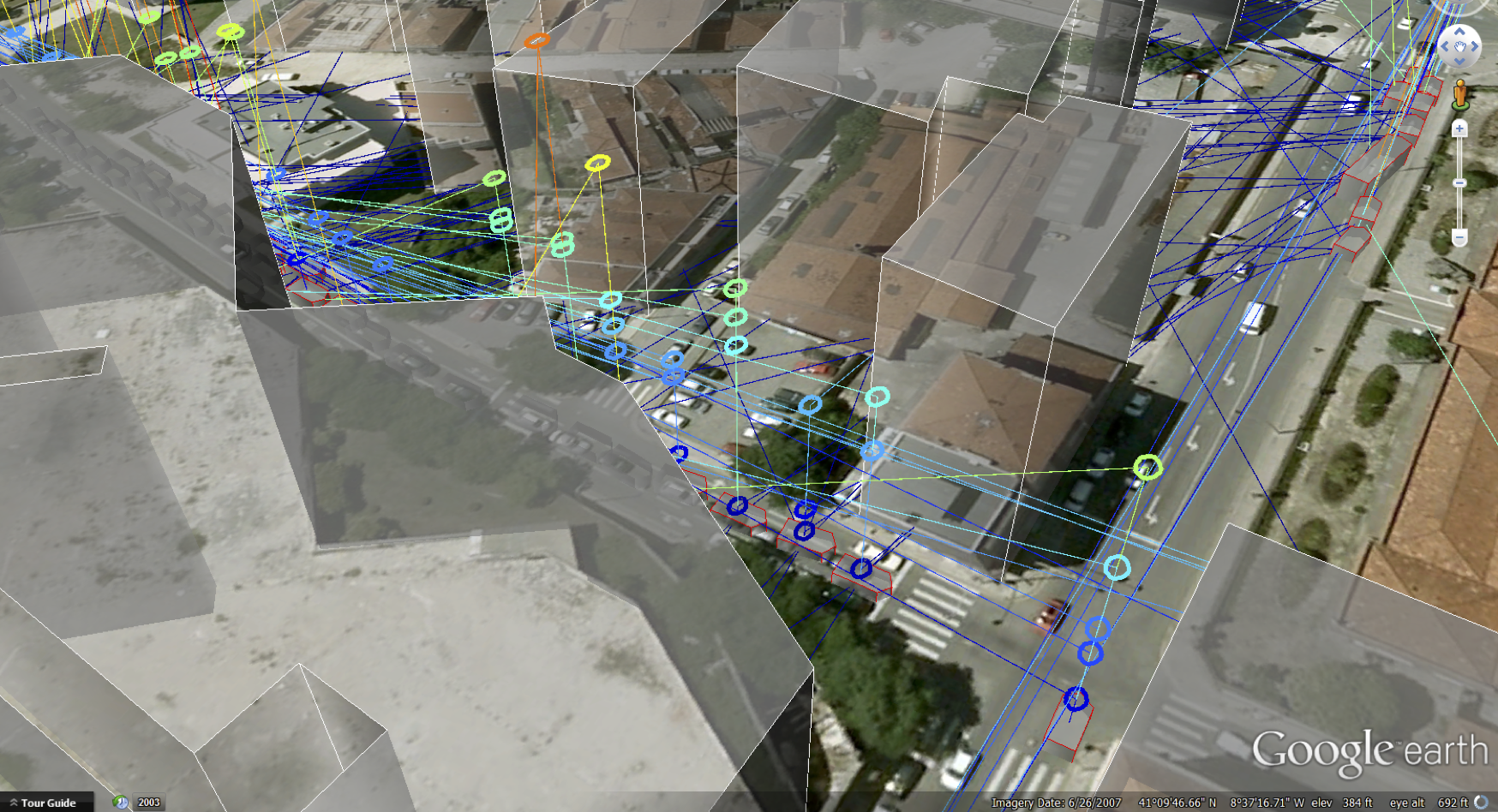
Google Earth output of GEMV2 - street level
This work was funded in part by the Portuguese Foundation for Science and Technology under Carnegie Mellon | Portugal Program and under project DRIVE-IN (grants SFRH/BD/33771/2009 and CMUPT/NGN/0052/2008).